Esta barra, indica o nível de dificuldade encontrado para cada experiência realizada, sendo:
"VERDE", indicação de nível 1 a 5 (Fácil);
"AMARELO", indicação de nível 6 a 8 (Médio);
VERMELHO, indicação de nível 9 e 10 (Difícil);
Sistema de Segurança e Controle de Acesso com RFID e Arduino
Este projeto, é uma evolução do projeto original "Arduino - Sistema de Segurança, Controle de Acesso"
veja em: http://arduinobymyself.blogspot.com.br/2012/03/arduino-sistema-de-seguranca-controle.html
Agora ao invés de usarmos um teclado para entradas de senha e para a liberação de uma porta ou acionamento de um dispositivo; usaremos um RFID (Radio Frequency Identifier Device) dispositivo de identificação via rádio frequência.
Usaremos também um display LCD com 20 caracteres e 4 linhas para mostrar as mensagens do sistema, além de um servo-motor para efetuar o acionamento mecânico de travamento/liberação de uma porta ou outros disposivos (tais como catraca, fechaduras, etc...).
O componente RFID é o MFRC522AN (MiFare RC522AN 13.56 MHz comunicação SPI) que pode ser facilmente encontrado em sites do brasil ou da china e por um preço acessível.
http://www.fystore.com/p42892/RFID-module-Kits-S50-13-56-Mhz-6cm-With-Tags-SPI-Write-amp-Read-for-arduino-uno-2560.html
FUNCIONAMENTO:
Os usuários terão cartões e ou tokens/tags de acesso cadastrado no software ou em uma memória.
Ao aproximar o cartão/token/tag do sensor RFID (aproximadamente 6 cm), o número serial deste cartão/token/tag é detectado e assim comparados com os seriais que estão cadastrados no software ou numa base de dados em uma memória; se for um número de serial cadastrado, o sistema libera a entrada deste usuário acendendo um LED verde e colocando mensagens de reconhecimento do usuário e de boas vindas no display LCD, alem de um servo-motor ser acionado para liberar um dispositivo mecânico. Caso contrário, o sistema não libera o acesso do usuário, acendendo um LED vermelho de advertência e mostrando mensagem no display LCD para o usuário contactar a administração.
Durante o processo de liberação ou rejeição dos usuários, sinais sonoros característicos serão tocados em um buzzer.
MATERIAL:
1 x Arduino UNO, MEGA, Duemilanove ou Teensy, etc...
1 x RFID MFRC522AN (comunicação SPI)
1 x servo-motor
1 x LCD 20x4 I2C
1 x LED verde
1 x LED vermelho
2 x reistor de 220R
1 x Buzzer
1 x Bread Board
Fios e cabos para as ligações
COMPONENTES:
 |
| Cartões e Tags RFID |
 |
| Token ou Tag |
 |
| Parte traseira do display LCD 20x4 I2C |
GND > GND do Arduino
VCC > +5V do Arduino
SDA > pino A4 do Arduino
SCL > pino A5 do Arduino
 |
| Parte frontal do display LCD 20x4 I2C |
 |
| Módulo RFID MFRC522AN |
 |
| Pinagem e interligação com arduino UNO e MEGA |
INTERLIGAÇÃO:
Para o Arduino UNO temos:
Reset > Pin 5
SS > Pin 10
MOSI > Pin 11
MISO > Pin 12
SCK > Pin 13
Ground > Ground
3.3v > 3.3v
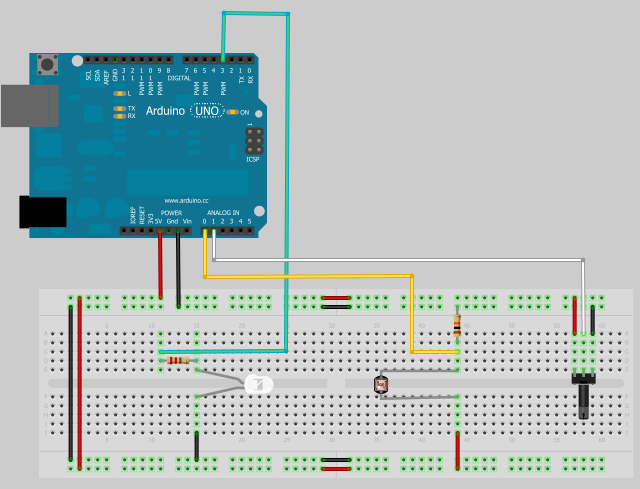
Projeto completo:
Lembrar que o LCD é I2C e 20x4 e o RFID é o MFRC522AN.
Buzzer, servo e outros componentes são de uso geral.
 |
| Projeto completo |
Os arquivos foram depositados no google drive, para acessar, crie sua conta.
Este é o sketch para o arduino, deve ser colocado em uma pasta com o mesmo nome do arquivo. https://docs.google.com/file/d/0B_YlEklLDDS7SzhtU1BhZGMxMW8/edit?usp=sharing
Este é o arquivo de nome "pitches.h", necessário para tocar as notas musicais e sons, ele deve estar na mesma pasta do sketch do Arduino.
https://docs.google.com/file/d/0B_YlEklLDDS7cmVDQmRpT29xRlE/edit?usp=sharing
Aqui está o link para a biblioteca RFID:
https://drive.google.com/file/d/0B_YlEklLDDS7dDVkaHNVVG5vcjQ/edit?usp=sharing
Todos os arquivos podem ser obtidos no GitHub:
https://github.com/Arduinobymyself/ArduinoRFID.git VIDEO & FOTOS:
Dúvidas e sugestões para: arduinobymyself@gmail.com
Este é um video preliminar, somente para visualizar o funcionamento geral.
http://youtu.be/2O7IVOfFptA
 |
| Vista Geral |
 |
| Componentes na BreadBoard |
 |
| Display e RFID tag |
 |
| Display, RFID tag/card |
 |
| Mensagem de ID encontrado |
 |
| Mensagem de acesso garantido |
 |
| Mensagem de acesso negado |